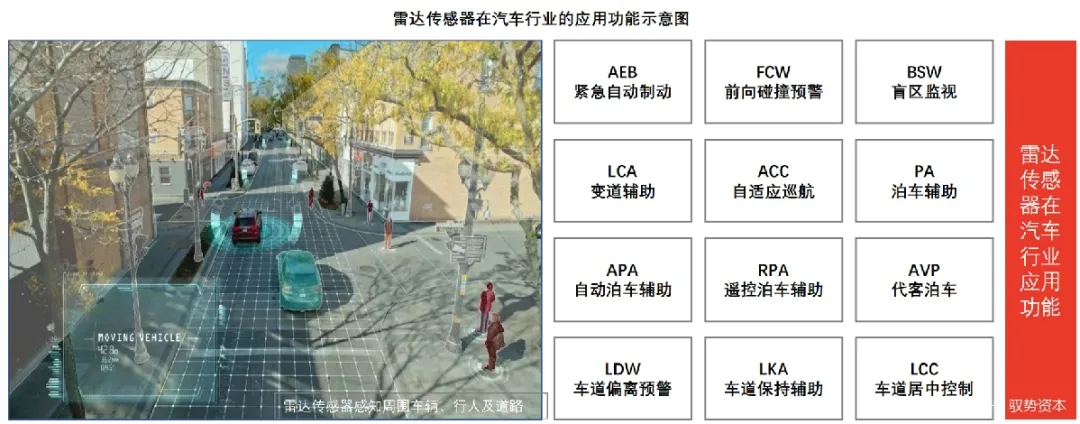
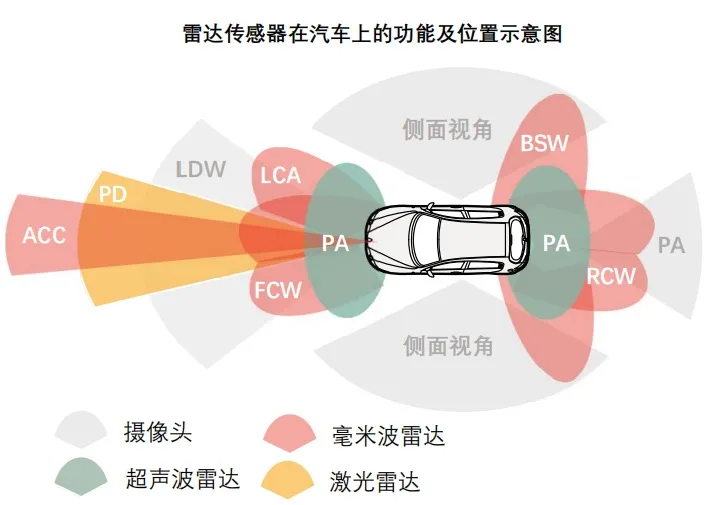
现阶段@@@@,中国@@量产的自动驾驶@@车型@@多位于@@@@L2阶段@@,L2阶段@@通过传感器确定周围驾驶环境@@,进行车路@@、行人及@@道路感知@@,在感知信息的基础上进行警示或@@制动等动作@@,辅助驾驶员安全驾驶@@,因而@@,雷达传感器为该自动驾驶@@阶段@@最核心的组成部分@@。雷达传感器通过@@TOF或@@FMCW技术@@探测物体的相对位置@@、相对速度@@、相对角度@@,并在算法和@@决策平@@ 台的辅助下实现如@@AEB紧急自动制动@@、FCW前向碰撞预警@@、BSW盲区监视@@等十多项功能@@@@。
1、AEB(自动紧急制动@@)功能@@
定义@@:AEB是@@ADAS系统@@的重要功能@@@@,共分为三个档次@@:
(1)FCW,当存在潜在的碰撞危险时@@@@,AEB系统@@将@@会及@@时@@通过视觉@@、听觉和@@@@/或@@触觉报警@@(例如座椅震动@@)通知驾驶员@@;
(2)二级警报@@,若驾驶员无法应@@,则出现限速自动提示@@;
(3)自动介入刹车@@,必要的情况下由@@AEB自动控制刹车系统@@@@,完成制动操作@@,从而减轻或@@避免碰撞伤害@@,该功能@@在@@7-180km范围内均可启动@@。
根据@@美国公路安全保险协会数据@@,AEB系统@@可将@@追尾事故发生的概率降低@@56%
分类@@:(难度由低@@→高@@)
根据@@事故类型@@,E-NCAP将@@AEB系统@@分为三类@@:
1.城市专用@@AEB系统@@——多发生在交通拥堵的路口@@,速度慢@@(<20km/h),碰撞程度低@@;
2.高@@速公路专用@@AEB系统@@——多发生于驾驶员疲劳的高@@速@@(50-80km/h)驾驶场景@@;
3.行人保护专用@@AEB系统@@——检测行人与自行车@@,需预测其运算路径@@,算法复杂@@。
前两者更适合使用毫米@@波@@雷达@@@@,而第@@3种需在前两者的基础上进行图像捕捉@@,因而@@需补充摄像头@@@@。
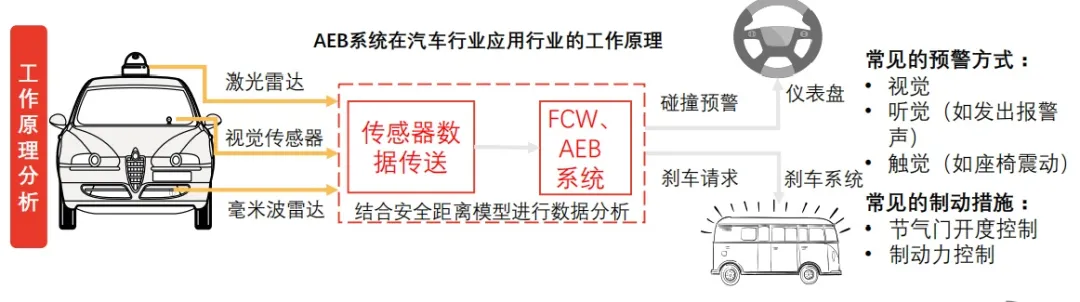
工作原理@@:AEB可通过视觉传感器@@@@、毫米@@波@@雷达@@和@@激光雷达@@等@@技术@@实现@@,雷达传感器或@@摄像头@@传感器测出前车或@@障碍物距离@@,数据分析模块将@@测出距离与安全距离@@、警报距离进行比较@@,当距离过小时@@@@,AEB系统@@则会发出碰撞预警@@,若驾驶员未能及@@时@@进行制动操作@@,AEB系统@@将@@对刹车系统@@发出刹车请求@@,实现自动制动@@。
毫米@@波@@雷达@@:具备@@全天候全天时@@工作优势@@,但存在横向辐射盲区@@。
激光雷达@@:除@@探测距离长外@@,还可测量横向位置@@,但易受天气影响@@。
视觉传感器@@:具备@@明显成本@@优势@@,但识别准确度仍需提升@@,且受天气影响大@@。
成本@@:单摄像头@@版@@@@AEB成本@@约@@600元@@,毫米@@波@@雷达@@版@@成本@@约@@@@1,500元@@,激光雷达@@版@@本成本@@则过万@@。
综合性能和@@成本@@情况考虑@@,AEB系统@@最佳传感器配置为@@“毫米@@波@@雷达@@+视觉传感器@@”组合@@。
发展现状分析@@
截至@@2019年@@上半年@@@@,中国@@AEB配置的装车渗透率@@约为@@9%,主要搭载在@@20万元@@及@@以上的外资品牌车型@@上@@,如奔驰@@Pre-safe、沃尔沃@@City safety、大众@@Front Assist、丰田@@PCS。
随着@@2018版@@C-NCAP逐渐实施@@,未来@@3年@@AEB系统@@在@@中国@@市场的@@需求将@@迎来爆发式增长@@。
2、BSW(盲区监视@@)功能@@
定义@@:BSW系统@@通过在车辆后部安装两颗毫米@@波@@雷达@@以探测后视镜盲区范围@@,当探测到盲区内存在障碍物则向驾驶员发出警报@@,辅助进行变道或@@减速@@。BSW系统@@基本功能@@包括两项@@:
(1)BSW盲区监测@@,使用毫米@@波@@雷达@@进行盲区障碍物监测@@,并提供视觉@@、听觉警报服务@@;
(2)LCA变道辅助@@,在车辆变道过程中@@,探测相邻车道是@@否有车辆快速接近的系统@@@@,并发出警告@@。工作条件@@:行驶速度@@>15km/h,或@@转弯半径@@>100m。
盲区是@@汽车设计最大的缺陷之一@@,根据@@美国国家公路交通安全管理局数据@@,每年@@有@@80多万起与盲点有关的安全事故发生@@,其中@@约@@300件导致死亡车祸@@。这也是@@@@BSW系统@@存在的重要原因@@。
分类@@(按应用场景@@划分@@)
SBSD侧面盲区监测@@@@
STBSD转向盲区监测@@@@
功能@@拓展@@(开发难度由低@@@@→高@@)
1.RCTA在倒车时@@@@,实时@@监测车辆后部横向接近的障碍物@@,并发出警告@@。
2.DOW在即@@将@@开启车门时@@@@,实时@@检测车辆侧后方障碍物@@,并发出警告@@。
3.RCTB在倒车时@@@@,实时@@监测车辆后部横向接近的障碍物@@,必要时@@主动进行制动@@。
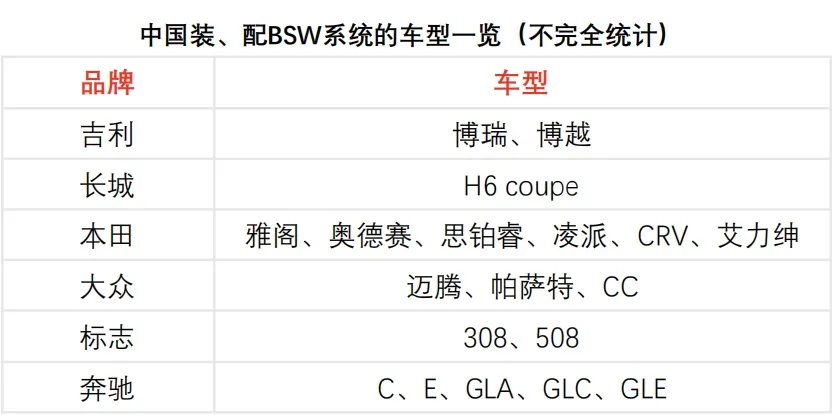
发展现状分析@@
此外@@,根据@@2019年@@9月发布的@@《美国消费者报告@@》显示@@,BSW系统@@在@@ADAS辅助安全系统@@中避险百分比最高@@@@,可避免@@60%的车祸@@。因而@@,BSW是@@ADAS系统@@中配置率较高@@的一项功能@@@@,截至@@2019年@@上半年@@@@,其在中国@@市场的@@渗透率@@为@@@@@@17%,其中@@,价格在@@40万元@@以上的汽车车型@@的渗透率@@最高@@@@,达到@@56%,BSW选配价格在@@@@5,000-7,000元@@之间@@@@。

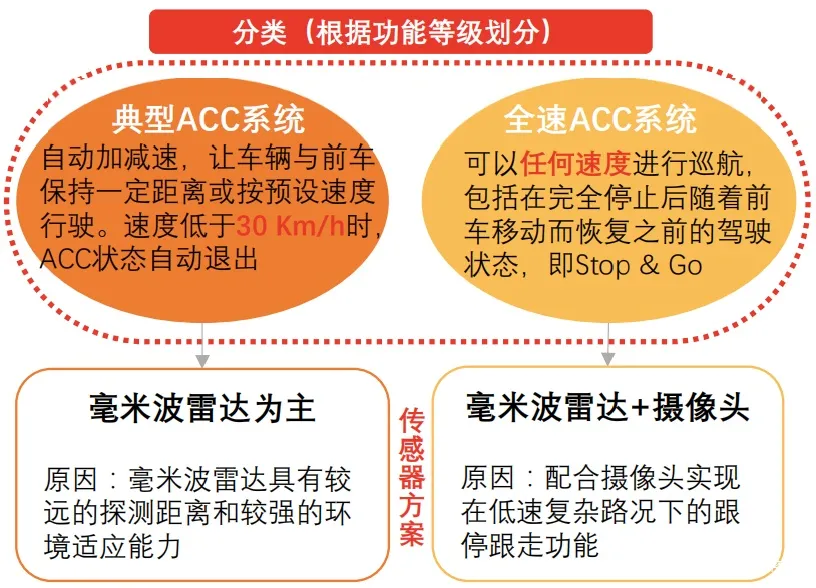
3、ACC(自适应巡航@@)功能@@
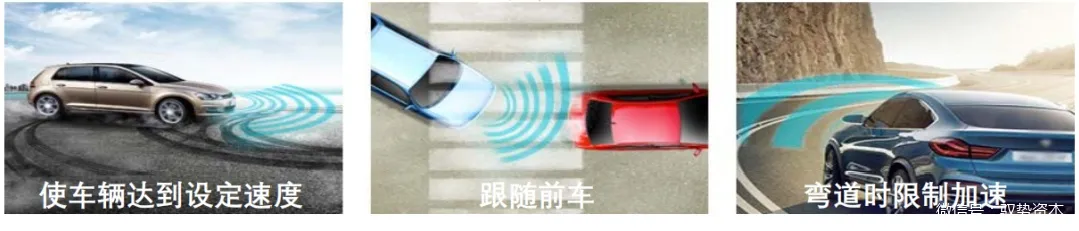
定义@@:ACC系统@@是@@一种智能化的自动控制系统@@@@,借助外部传感器@@(毫米@@波@@雷达@@、摄像头@@、激光雷达@@等@@)检测自车与前方@@车辆的距离和@@相对速度@@@@,并控制自身车速和@@前车保持固定的距离@@。假设前车变道离开@@,在未识别到新的目标物之前@@,ACC系统@@会控制车辆按照设定@@的车速行驶@@。
ACC既可适用于@@低速场景@@(TJA交通拥堵辅助@@),也可适用于@@高@@速场景@@(ICA智能巡航辅助@@)。
应用场景@@
工作流程分析@@
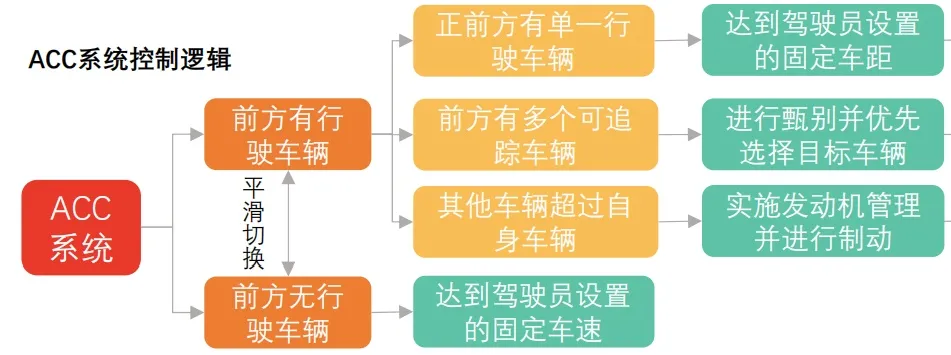
ACC系统@@利用传感器得到行车所需信息@@,当发现前车减速或@@出现新目标时@@@@,电控单元@@将@@发送执行信号给发动机或@@制动系统@@@@,做出保持车距或@@自动制动等相关动作@@。若前方@@没有车辆@@,则恢复设定@@车速@@。
因涉及@@到汽车的自动制动@@,ACC系统@@还需协调发动机管理系统@@@@、自动变速箱控制器@@、电子@@稳定程序等部件进行工作@@。
1、最常用的安全距离模型为车间安全时@@距模型@@,即@@跟车距离以时@@间为单位设置@@,通常为@@1-2.5s。
2、需辅助车道识别单元@@@@、转向角传感器@@、横摆率传感器@@、车轮转速传感器等多部件进行判断@@。
3、ACC系统@@的自动制动力为车辆最大制动力的@@@@30%-40%,位于@@0.3-0.4g之间@@。若系统@@判定需要急刹@@(>最大制动力的@@40%)时@@,仪表上将@@会出现视觉信号并发出蜂鸣警报@@。
备@@注@@:此处的@@“前方@@”指毫米@@波@@雷达@@的探测距离@@,一般为@@200米@@
4、PA(停车辅助@@)功能@@
定义@@与原理@@:
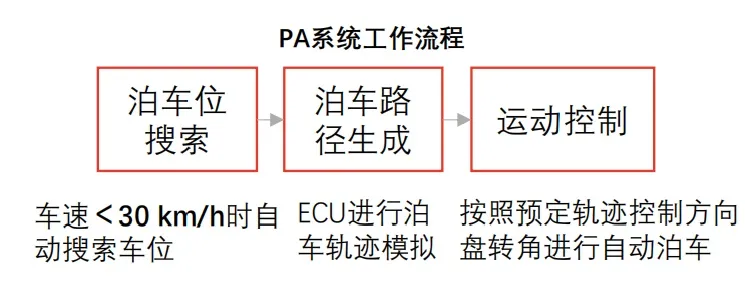
PA系统@@通过安装在车身上的超声波雷达及@@摄像头@@探测停车位置@@,绘制停车地图@@,并实时@@动态规划泊车路径@@,将@@汽车指引或@@直接自动控制方向盘将@@汽车驶入停车位置@@。
工作原理@@:PA系统@@通过搜索泊车位@@、生产泊车路径和@@运动控制三大功能@@@@,实现自动泊车辅助@@。当汽车行驶速度@@低于@@30km/h时@@,其搜索功能@@将@@自动打开@@,在搜索到合适车位后@@,ECU将@@从速度和@@运动两方面进行泊车轨迹模拟@@。最后@@,控制器将@@对汽车进行横向和@@纵向控制@@,从而完成泊车动作@@。
工作流程分析@@
分类@@(按功能@@@@)
PA系统@@目前已发展至第三代@@,从最开始的驾驶员必须在车内配合挂挡完成泊车@@(APA系统@@),发展到驾驶员可以站在车外@@5米@@外使用手机遥控泊车@@(RPA远程遥控泊车@@),最后@@到汽车自主学习泊车路线完成固定车位泊车@@(自学习泊车@@),未来@@将@@出现第四代@@PA系统@@,即@@AVP代客泊车@@。

5、LKA(车道保持@@)功能@@
定义@@:LKA系统@@通过角雷达@@、多功能@@摄像头@@识别本车相对于车道中央的位置@@,如车辆靠近标识线或@@偏离车道@@,则通过方向盘震动或@@声音来进行警告@@,必要时@@通过自动转向干预使车辆回到车道内@@。
LKA系统@@包含三项子功能@@@@:
(1)LDW,在车道偏离时@@@@,通过声音@@、视觉和@@震动等方式发出预警@@;
(2)LDP,在汽车快要驶离车道时@@@@,通过施加适当转向干预实现位置修正的系统@@@@;
(3)LCC,通过监控汽车与车道中线的相对位置@@,主动辅助驾驶员保持在车道中线位置@@,减少驾驶员负担@@。
产生的必要性@@
在欧洲@@,39%的意外交通事故是@@因偏离车道而产生的@@,在美国这一比例为@@44%,而中国@@这一比例更是@@高@@达@@50%。高@@交通事故发送概率是@@催生@@LKA系统@@出现的重要原因@@。
根据@@2019年@@9月发布的@@《美国消费者报告@@》显示@@,LKA和@@LDW的避险指数为@@31%。截至@@2019年@@上半年@@@@,中国@@市场的@@LKA渗透率@@为@@26.4%,LDW的渗透率@@为@@@@44.6%。
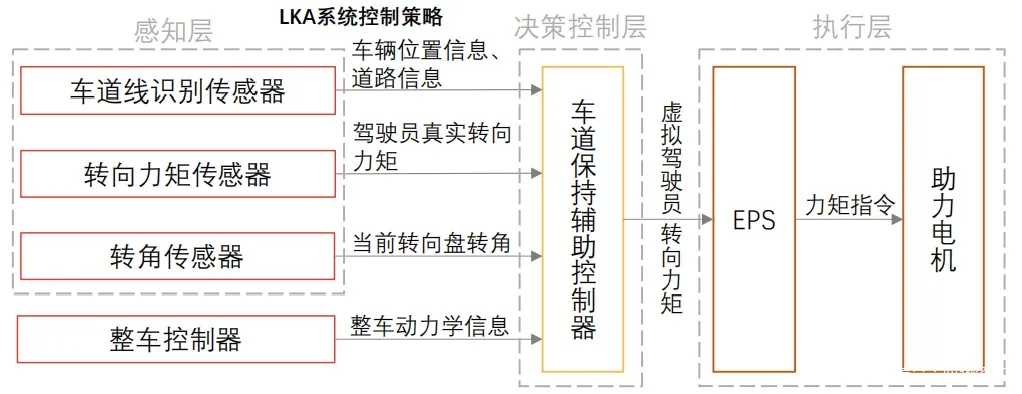
工作流程分析@@
LKA系统@@可分为感知层@@、决策层和@@执行层三部分@@。其中@@,感知层用于采集车道信息和@@车辆信息@@,决策层用于判断是@@否需要转道并计算输出力矩@@,执行层为@@EPS系统@@,EPS系统@@使用虚拟驾驶员转向力矩代替扭矩传感器监测到的驾驶员转向力矩@@,完成车道保持@@辅助@@。
适用条件分析@@
LKA系统@@的缺陷@@:
1.LKA系统@@是@@基于视觉传感器@@辨认车道线的@@,如果摄像头@@被遮挡@@、车道线不清晰@@、大雨雾霾等恶劣天气@@、黑夜等情况都会导降低系统@@判断精度@@;
2.LKA系统@@的转向能力有限@@,如果车辆的横向偏移速度超过@@ESP设定@@,车辆就会跑出车道@@。
使用限定条件@@:
1.目前量产的@@LKA主要适用于@@高@@速场景的辅助功能@@@@,只有当车辆行驶速度@@@@>60km/h才@@LKA系统@@才@@介入工作@@,并限制该系统@@在@@恶劣天气情况下的使用@@;
2.根据@@2019年@@1月颁布的@@《道路车辆先进驾驶辅助系统@@@@(ADAS)术语及@@定义@@@@》的征求意见稿规定@@,LKA系统@@激活时@@引发的车辆横向加速度不大于@@3m/s2,车辆横向加速度变化率不大于@@5m/s3。
6、其他功能@@@@
除@@AEB、FCW、BSW、LCA、SBDS、STBSD、ACC、RCTA、DOW、RCTB、APA、RPA、自学习泊车@@、AVP、LKA、LDW、LDP及@@LCC功能@@外@@,雷达传感器还可应用在@@HUD、ROA、RCW、PD、SLA、TJA、ICA及@@智能驾驶司机上@@。

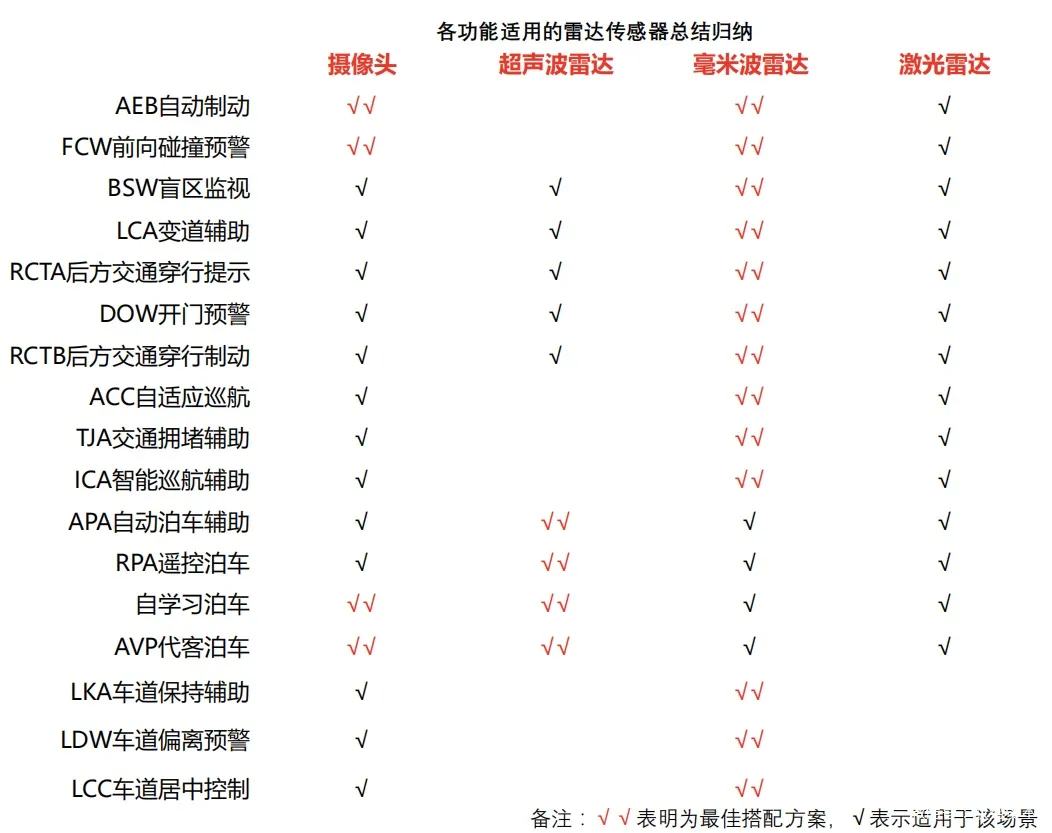
功能@@总结@@@@
ADAS功能@@通过传感层@@、决策层和@@执行层三个模块实现@@,其中@@传感层通过雷达传感器及@@视觉传感器@@对环境进行数据采集@@,是@@各种辅助驾驶功能@@实现的基础@@。
三种雷达传感器性能有所区别@@,适用的场景也有所不同@@。其中@@,超声波雷达能量消耗慢@@,超声波的穿透性强@@,但其探测距离短且不适合高@@速运行@@,因而@@只适合自动泊车等低速场景@@。毫米@@波@@ 雷达具备@@全天时@@全天候的优势@@,适用于@@AEB、FCW、BSW、LCA、ACC、LKA等多个应用场景@@@@,而激光雷达@@可@@360度无死角扫描@@,从而形成环境三维模型@@,但其价格昂贵@@,性价比不高@@@@,因而@@其虽可应用于多个场景@@,但均未作为最佳选择@@。
来源@@:驭势资本@@
免责声明@@:本文为网@@络转载文章@@,转载此文目的在于传播相关技术@@知识@@,版@@权归原作者所有@@,如涉及@@侵权@@,请联系小编删除@@@@(联系邮箱@@:service@eetrend.com )。