高精度定位@@@@技术@@是当今科技领域重要研究方向之一@@。在物联网@@时代@@,几乎所有的应用场景都与位置信息服务有关@@,尤其是对于移动物体@@,定位@@需求更为重要@@,因此@@定位@@技术@@@@受到了广泛的关注@@。
提起定位@@@@,大家都会想到@@GNSS(全球卫星导航系统@@)定位@@。GNSS(Global Navigation Satellite System)是多个卫星系统的总称@@,包括@@中国的北斗@@BDS、美国的@@GPS、俄罗斯的@@GLONASS、欧洲的@@GALILEO、日本的@@QZSS和印度的@@IRNSS。
GNSS定位@@基本原理@@
GNSS卫星以导航电文形式发送星历参数@@和时间信息@@,用户接收机@@跟踪测量卫星信号@@,通过信号在空中传播时间和速度@@,计算出用户接收机@@到@@GNSS卫星的距离@@,基于卫星的星历计算出@@GNSS卫星的空间@@瞬时坐标@@,根据@@距离空间@@交会的方法@@,推算出用户接收机@@的空间@@三维坐标@@(x,y,z)。
用户接收机@@时钟@@源存在钟差@@,是影响定位@@精度主要误差之一@@,为此引入钟差@@△tj,所以需要至少接收@@4颗卫星才能推算出用户接收机@@的位置坐标@@。

图@@1 GNSS定位@@基本原理@@
(x-x1)2+(y-y1)2+(z-z1)2=(ρ1+△ρ1+△ρ2+ C•△tk- C•△tj)2
(x-x2)2+(y-y2)2+(z-z2)2=(ρ2+△ρ1+△ρ2+ C•△tk- C•△tj)2
(x-x3)2+(y-y3)2+(z-z3)2=(ρ3+△ρ1+△ρ2+ C•△tk- C•△tj)2
(x-x4)2+(y-y4)2+(z-z4)2=(ρ4+△ρ1+△ρ2+ C•△tk- C•△tj)2
(xi,yi,zi) :卫星坐标@@(i=1,2,3,4);
(x,y,z) :接收机@@坐标@@,未知@@;
△tj:接收机@@钟差@@,未知@@;
△tk:卫星钟差@@,可修正@@(k=1,2,3,4);
C:光的传播速度@@;
ρi:接收机@@实际测得的伪距@@(i=1,2,3,4);
△ρ1:电离层@@延迟误差@@,可修正@@;
△ρ2:对流层@@延迟误差@@,可修正@@。
从上面公式可知@@,接收机@@时钟@@源稳定度直接影响定位@@测算精度@@,接收机@@时钟@@源稳定度越高@@,测算出接收机@@位置精度也越高@@。
GNSS数据@@误差@@
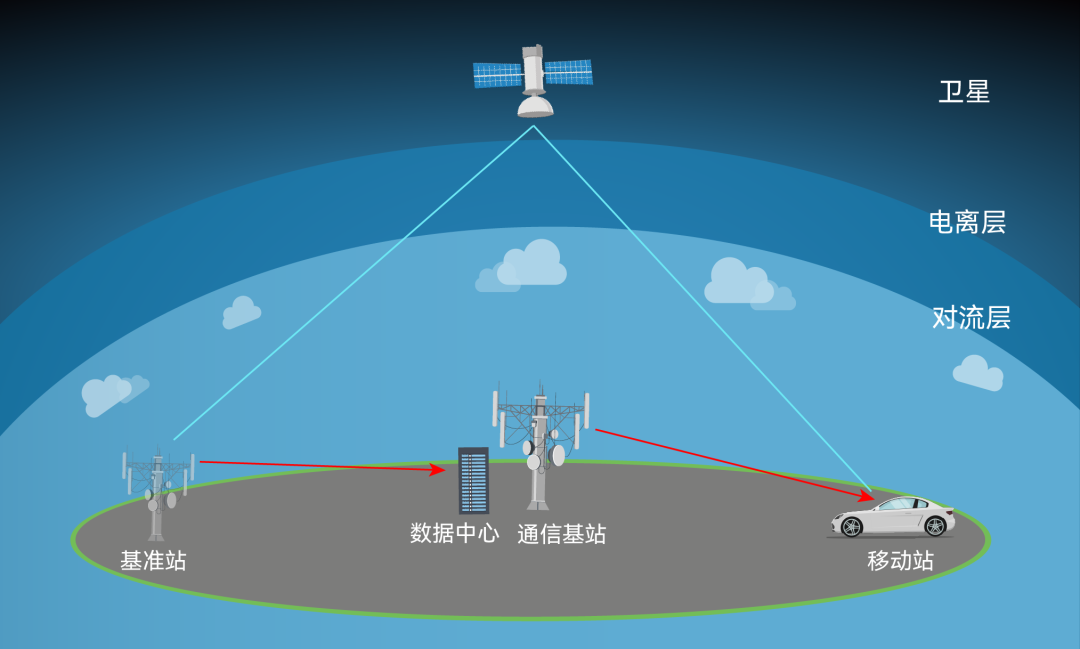
卫星下发的信号到达用户接收机@@@@,经过电离层@@@@、对流层@@、反射物@@,最终抵达用户接收机@@@@,而并非通过真空直达@@,因此@@接收机@@测量结果与其真实的位置有一定差距@@,称为伪距@@。

图@@2 GNSS误差来源@@
GNSS数据@@误差@@可分为四类@@:与卫星有关的误差@@、与信号传播有关的误差@@、与接收机@@有关的误差以及与地球转动有关的误差@@。
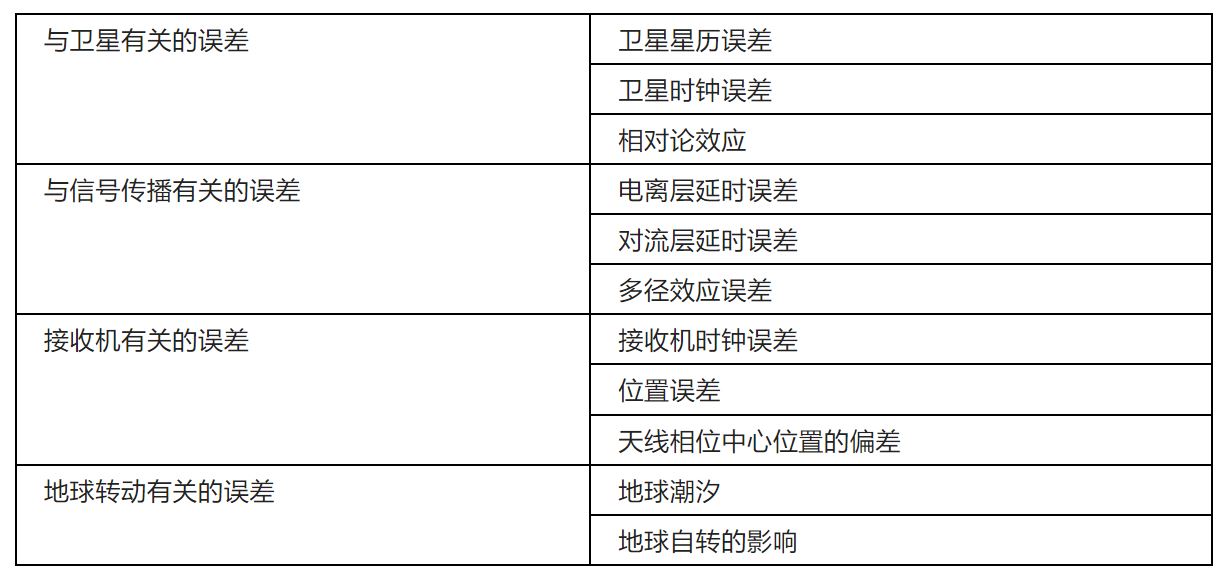
表@@1 GNSS误差来源@@
1、卫星星历误差@@
由星历给出的卫星位置与卫星实际位置之差称为卫星星历误差@@@@。卫星采用原子钟作为基准时钟@@源@@,卫星星历误差@@主要由卫星钟差@@@@、频偏@@、频漂等@@产生@@。
改进措施包括@@忽略轨道误差@@、通过轨道改进法处理观测@@数据@@@@、采用精密星历和同步@@观测@@值求差等方法@@。
2、电离层@@延迟误差@@
由于大气层中的中性分子受太阳辐射的影响发生电离@@,产生大量的正离子与电子@@@@,电磁波的传输速率与电子@@密度有关@@,因此@@真空中电磁波的传播速度乘以信号传播时间得到的距离@@,与卫星和用户@@接收机@@间的真实几何距离不相等@@,误差范围可达@@50m~150m。
改善措施包括@@双频观测@@@@、电离层@@模型辅助修正和同步@@观测@@值求差等方法@@。
3、对流层@@延时误差@@
由于气候@@、大气压力@@、温度@@、湿度等变化@@,电磁波在对流层@@传播速度和路径都会受到影响@@,误差范围可达@@2.3m~20米@@。
改善措施包括@@数学模型@@、参数@@、同步@@、测量等方法@@。
4、多径效应@@误差@@
卫星信号下发给接收机@@@@,通过不同路径直达或@@经过反射物@@抵达用户接收机@@@@,信号相互叠加产生干扰@@,使原信号失真@@、误码@@、信号衰落@@,称之为多径效应@@@@,也是卫星定位@@的主要误差源之一@@。
改善措施包括@@接收机@@选址@@、天线设计@@、天线极化等方法削弱该误差@@。
5、接收机@@误差@@
接收机@@的误差主要来自时钟@@源钟差@@、频偏@@、频漂等@@,造成测算定位@@不准确@@,也是主要误差源之一@@。
改善措施包括@@采用高稳晶振做接收机@@本振时钟@@源@@、改进接收机@@电路设计等方式消除误差@@。
GNSS定位@@技术@@@@由于受到卫星钟差@@@@、电离层@@、对流层@@、多径效应@@、用户接收机@@钟差@@等影响@@,测算得到伪距误差范围在米@@级@@,无法满足自动驾驶@@等应用场景高精度定位@@@@需求@@。如何提高@@定位@@精度呢@@?可以采用差分@@@@GNSS定位@@技术@@@@。
差分@@GNSS定位@@基本原理@@
在位置已精确测定的已知点上配一台@@基准站@@@@,和用户@@(移动站@@)同步@@进行@@GNSS观测@@,将得到的单点定位@@结果与基准站@@坐标比较@@,求解出实时差分@@修正值@@。

图@@3 差分@@GNSS定位@@基本原理@@
差分@@GNSS定位@@可分为位置差分@@@@、伪距差分@@和载波相位差分@@@@@@。其中@@,载波相位差分@@@@基于实时处理两个测站载波相位观测@@量的差分@@方法@@,定位@@精度达到厘米@@级甚至毫米@@级@@。
载波相位差分@@@@:又称@@RTK(Real-time Kinematic)实时动态载波相位技术@@@@,即@@将基准站@@采集的载波相位发给用户接收机@@@@,进行求差解算坐标@@。由于载波的精度远高于其内容@@(C/A码速率是@@1.023MHz,一个码的长度为@@977.5ns,即@@293m,而载波的速率是@@1575.42MHz,一个载波的长度是@@635ps,即@@19cm)。因此@@,载波相位差分@@@@可使定位@@精度达到厘米@@级甚至毫米@@级@@@@,广泛应用于移动站@@需要高精度定位@@@@的领域@@。常用的@@RTK定位@@技术@@@@分为常规@@@@RTK和网@@络@@@@RTK。
常规@@RTK
常规@@RTK定位@@系统包括@@@@:基准站@@、数据@@中心@@、数据@@通信网@@@@、移动站@@。基准站@@通过数据@@链路将自己所获得的载波相位观测@@值及站坐标实时播发给在其周围工作的移动站@@@@,移动站@@通过动态差分@@定位@@的方式@@,确定移动站@@相对于基准站@@的位置@@,并根据@@基准站@@的坐标得到自身的瞬时绝对位置@@。
图@@4 常规@@RTK组网@@@@
基准站@@和移动站@@接收机@@时钟@@源稳定度越高@@@@@@,钟差越小@@,测算位置精度也越高@@。
常规@@ RTK定位@@技术@@@@虽然可以满足很多应用的要求@@,基于电离层@@@@、对流层@@延迟误差@@在一定范围内具有一致性@@,所以移动站@@与基准站@@的距离不能太远@@,定位@@精度可达分米@@级@@。
网@@络@@RTK
网@@络@@RTK定位@@系统包括@@@@:基准站@@网@@@@、数据@@处理中心@@、数据@@通信网@@@@络和移动站@@@@。其中@@基准站@@网@@@@由若干个基准站@@组成@@,每个基准站@@都配备@@有双频全波长@@GNSS接收机@@、数据@@通信设备@@等设备@@@@,通过长时间@@GNSS静态相对定位@@等方法@@,可以精确得到基准站@@的坐标@@,基准站@@GNSS接收机@@按一定采样率进行连续观测@@@@,通过数据@@通信网@@@@络将观测@@数据@@实时传送给数据@@处理中心@@@@,数据@@处理中心@@对各个站的数据@@进行预处理和质量分析@@,然后对整个基准站@@网@@@@的数据@@进行统一解算@@,实时估计出网@@内的各种系统误差的改正项@@(电离层@@、对流层@@和轨道误差@@),建立误差数学模型@@。

图@@5 网@@络@@RTK组网@@@@
基准站@@数量越多@@,接收机@@时钟@@源稳定度越高@@,数据@@中心@@建立误差数学模型@@越精准@@。同样@@,移动站@@接收机@@时钟@@源稳定度越高@@@@,测算定位@@精度越精准@@。
网@@络@@RTK技术@@与常规@@@@RTK技术@@相比@@,覆盖范围更广@@、成本更低@@、定位@@精度更高@@、用户定位@@的初始化时间更短@@,定位@@精度可以达到厘米@@级@@。
目前@@,高精度定位@@@@已广泛应用于导航定位@@@@、自动驾驶@@、智慧公交@@、车联网@@@@、车辆监管@@、智慧高速@@、道路安全监管@@、网@@约车监管@@、铁路监测@@、智能停车@@、智慧港口@@、智慧矿山@@、无人机植保@@、无人机航测@@、无人机物流@@、无人机监测@@、测量测绘@@、电网@@巡检@@、人员定位@@@@、桥梁监测@@、危房监测@@、可穿戴设备@@@@、高精度手机@@定位@@等领域@@。
从前面@@GNSS+RTK定位@@原理不难理解@@,基准站@@和移动站@@接收机@@时钟@@源钟差是高精度定位@@@@误差的主要来源之一@@。基准站@@时钟@@源稳定度越高@@,数据@@中心@@建立误差数学模型@@越准确@@;同时@@,移动站@@时钟@@源稳定度越高@@,结合误差数学模型修正量@@,最终测算自身定位@@精度也越高@@。
高精度定位@@@@应用越来越广泛@@,据@@GSA数据@@统计@@,GNSS设备@@预计@@2029年@@将达到@@28亿台@@@@。我们每个人都拥有一部手机@@@@,我们日常生活离不开手机@@定位@@业务@@,平均每人至少有@@1台@@GNSS电子@@产品@@,未来这是一个海量市场@@。与此同时@@@@,对时钟@@源要求也越来越高@@,不仅要求高稳定度@@、低相噪@@,同时@@也要求小型化@@、低功耗@@、低成本@@。
大普高稳时钟@@源产品@@,赋能高精度定位@@@@全方位解决方案@@
大普在时频领域深耕近@@20年@@,提供全系列高稳时钟@@源产品@@,包括@@:高稳时钟@@模组@@(Clock Module)、恒温晶振@@(OCXO)、温补晶振@@(TCXO)等系列@@,具有高精度@@、低相噪@@、低功耗@@、小尺寸@@、宽温区@@、高抗震@@、快启动等特点@@,关键性能指标位于国际领先地位@@,产品全部自主研发@@,从设计@@、制造@@、工艺@@、自动化测试等全部实现国产化@@、自主可控@@,为高精度定位@@@@应用提供全方位解决方案@@。

了解更多详情@@,欢迎来电垂询@@!
邮箱@@:sales@dptel.com
网@@址@@:https://www.dptel.com
总机@@:+86-0769-88010888
手机@@:+86-180-6899-8889