协作机器人@@
传统工业机器人体积庞大且安全系数低@@,因为作业半径内不允许有人@@。随着精密制造@@、柔性制造等动态非结构化生产需求增加@@,机器人与人@@、机器人与环境的共存对机器人设计提出了更高的要求@@,具备@@这种能力的机器人我们将其称为协作机器人@@@@。
协作机器人@@具有诸多优点@@,包括轻量化@@、环境友好性@@、智能感知@@、人机协作和@@易于编程等@@。在这些优点背后@@,有一项功能是@@非常重要的@@,那就是@@碰撞检测@@@@——主要作用是@@减少碰撞力对机器人本体的影响@@,避免机器人本体或@@者外围设备@@损坏@@,更重要的是@@防止机器人对人类造成损伤@@。
随着科学技术@@的发展@@,用于实现协作机器人@@碰撞检测@@的方式已经有很多@@,包括运动学@@、力学@@、光学等@@。当然@@,这些实现方式的核心都是@@具备@@各种检测功能的元器件@@。
协作机器人@@的碰撞检测@@@@
机器人的出现并非意在完全取代人类@@,很多工作需要人类和@@机器人相互合作来完成@@,这便是@@协作机器人@@诞生的背景@@。协作机器人@@的设计初衷是@@为了与人类在工作中进行互动和@@协作@@,以提升工作效率和@@安全性@@。
在一个工作场景下@@,协作机器人@@与人类直接合作@@,因此安全性问题怎么强调都不为过@@。为了保障人机协作的安全性@@, 业界制定了诸多相关的法规和@@标准@@,目的就是@@为了让协作机器人@@从设计之初就考虑到人机协作的安全性问题@@。
图@@1:碰撞检测@@位于协作机器人@@设计逻辑的底层@@(图@@源@@:节卡机器人@@)
同时@@,协作机器人@@自身也要确保安全可靠@@。由于协作机器人@@的空间@@自由度非常高@@,且主要替代人类在复杂@@、危险环境中的工作@@,因此在磨削@@、装配@@、钻孔@@、搬运等工作中@@,也需要对可能发生的碰撞进行快速可靠的检测@@。
为了让协作机器人@@不与人类@@、环境发生碰撞@@,设计者们将碰撞检测@@大致分为四个环节@@:
1. 预碰撞检测@@@@
在一个工作环境里部署协作机器人@@时@@,设计者希望这些机器人能够像人类一样熟知环境@@,规划自己的移动路径@@。为了达到这一点@@,设计者在协作机器人@@上安装具有一定计算能力的处理器和@@检测算法@@,并搭建摄像头@@、传感器和@@雷达的一种或@@者几种作为检测手段@@。如上所述@@,预碰撞检测@@@@是@@有行业标准可以遵循的@@,比如@@ISO/TS15066协作机器人@@设计标准中@@,就要求协作机器人@@在人接近时停止运行@@,人离开时立即恢复@@。
2. 碰撞检测@@
这就是@@一个非是@@即否的形态@@,代表协作机器人@@是@@否发生了碰撞@@。为了不发生误触发的问题@@,设计者会为协作机器人@@设定一个阈值@@。这个阈值的设定是@@非常考究的@@,既要保证不能频繁触发@@,同时@@也要极度灵敏以避免碰撞@@。由于机器人的控制主要靠马达@@,因此设计者将这个阈值和@@马达自适应算法结合在一起@@,做到碰撞即停@@。
3. 碰撞隔离@@
当系统确认碰撞发生之后@@,需要确认具体的碰撞点或@@者是@@碰撞关节@@。此时实施隔离目的就是@@让这个碰撞的部位停下来@@。传统机器人的碰撞隔离@@通过外部护栏来实现@@,协作机器人@@由于处于开放空间@@@@,因此就需要通过算法和@@反向加速度来实现@@。
4. 碰撞识别@@
此时协作机器人@@已经确认发生了碰撞@@,相关变量已经超出了阈值@@。这时候机器人上的处理器需要根据传感信息判断碰撞是@@否为偶发碰撞@@,如果判定结果为是@@@@,那么协作机器人@@需要自我修正@@;如果判定为非偶发碰撞@@,那么此时协作机器人@@将停机等待人类处理@@。
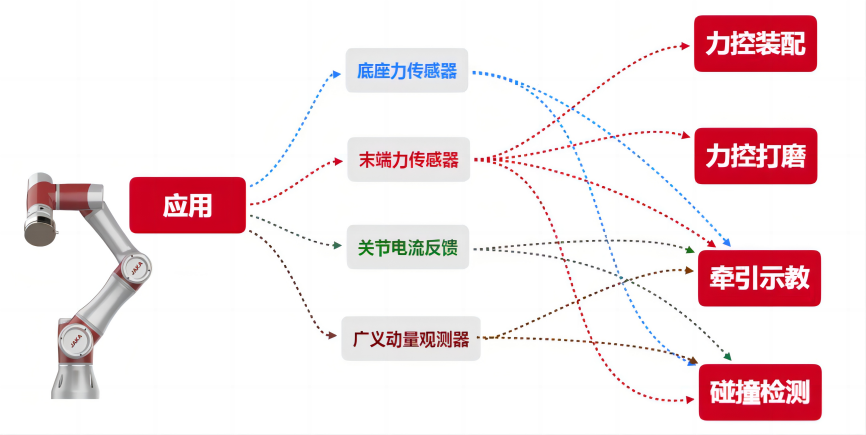
可以说碰撞检测@@是@@协作机器人@@实现自我感知非常重要的主张@@,为协作机器人@@的大规模应用和@@进入更广泛的场景提供了可能@@。在不同的碰撞环节@@,协作机器人@@对于传感器的需求是@@不一样的@@。比如@@在预碰撞检测@@@@环节@@,系统的主要目的是@@不让碰撞发生@@,因此传感器的职责就是@@环境感知@@。实现的路线有很多@@,比如@@基于视觉的环境感知@@,基于毫米波雷达的环境感知@@,还有基于激光雷达的环境感知等@@,那么就需要配合对应的传感器和@@算法@@。
当碰撞发生之后@@,重要的是@@协作机器人@@要第一时间知晓碰撞点和@@碰撞的程度@@,以采取进一步的措施防止情况进一步恶化@@。碰撞检测@@传感器便是@@在此时发挥作用@@。常见的碰撞传感器主要有机械式碰撞传感器@@、磁力式碰撞传感器@@、压电式碰撞传感器@@、应变式碰撞传感器@@、压阻片式碰撞传感器和@@水银开关式碰撞传感器等@@。
我们都知道@@,协作机器人@@在工作时@@,机械臂会被施加来自很多方向的力矩@@,用以让机械臂运动起来进行工作@@。如下图@@所示@@,搭载碰撞传感器的保护系统在检测到碰撞发生之后@@,会施加合力矩@@、转矩以及轴向负载的反作用力@@,协作机器人@@会立刻停止工作@@。
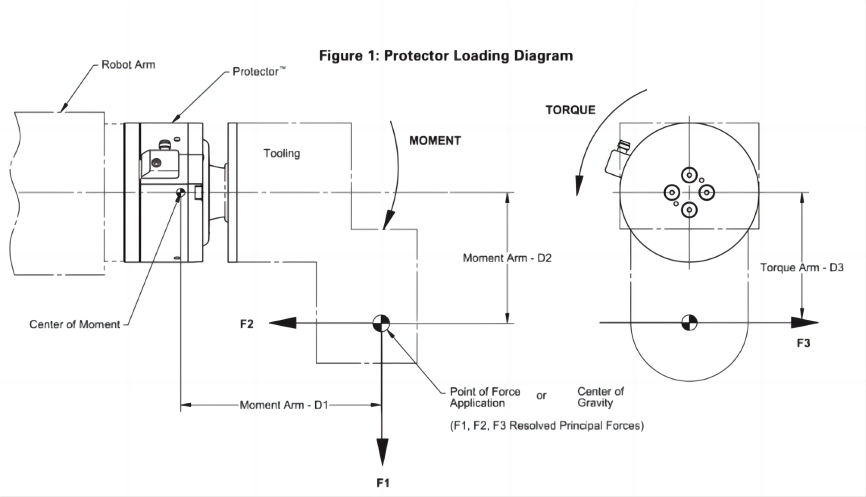
图@@2:机械臂保护系统框图@@@@(图@@源@@:ATI)
如果你已经迫不及待想要实现一款具有高度安全性的协作机器人@@@@,下面这两款贸泽电子@@@@在售的传感器都是@@很不错的选择@@。
具有高分辨率阈值的三轴数字加速度计@@@@
上文中提到@@,目前用于协作机器人@@的碰撞检测@@@@传感器已经非常多了@@,在此我们展开说一下三轴数字加速度计@@@@。
三轴数字加速度计@@可以用于测量物体在三个坐标轴上的加速度@@,当碰撞发生时@@,以此计算加速度计值之间的差值@@,当差值累计超过阈值时@@,则确认系统发生了碰撞@@。三轴数字加速度计@@是@@目前行业里用以确认碰撞发生的简单方式之一@@。
下面我们就为大家介绍一款贸泽电子@@@@在售的@@,可用于协作机器人@@碰撞检测@@的三轴数字加速度计@@@@,来自制造商@@ROHM Semiconductor,这款器件在贸泽电子@@@@官网@@上的料号为@@KX132-1211。

图@@3:KX132-1211三轴数字加速度计@@(图@@源@@:贸泽电子@@@@)
KX134和@@KX132三轴数字加速度计@@是@@两款硅微机械加速度计@@,具有用户可配置的@@@@3级高级数据路径@@(ADP),其中@@包含低通@@滤波器@@、低通@@/高通滤波器和@@@@RMS计算引擎@@,还配备@@了先进的唤醒和@@睡眠检测功能@@。

图@@4:KX132-1211三轴数字加速度计@@功能框图@@@@(图@@源@@:ROHM Semiconductor)
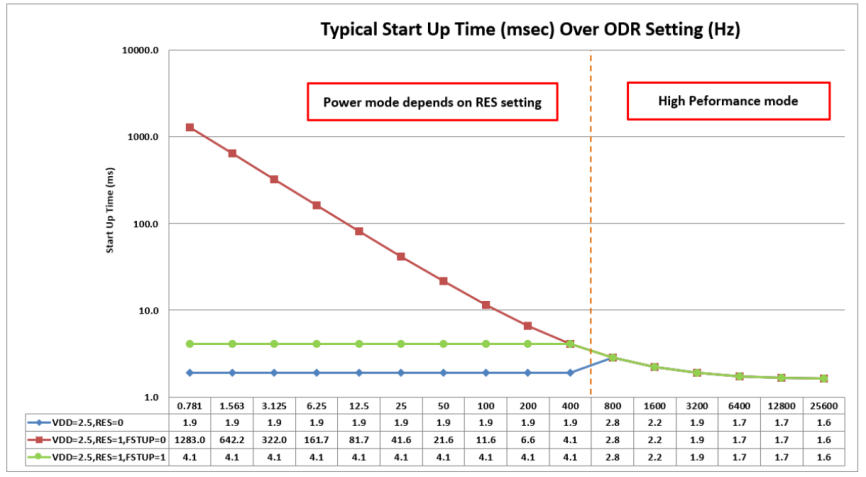
图@@5:KX132-1211三轴数字加速度计@@启动时间框图@@@@(图@@源@@:ROHM Semiconductor)
KX134和@@KX132三轴数字加速度计@@具有高分辨率阈值和@@高精度@@@@。其中@@,高分辨率阈值可配置到低至@@15.6mg,还在整个温度范围内降低了噪声并改善了线性度@@。
在精度@@方面@@,KX134-1211用户可配置的@@g值范围可达@@±64g,输出数据传输速率可达@@25600Hz;KX132-1211用户可配置的@@g值范围可达@@±16g,输出数据传输速率可达@@25600Hz 。两款三轴数字加速度计@@都集成了自由落体@@、Directional-Tap™/Double-Tap™和@@设备@@定向算法@@,提高@@了低功耗模式下基于温度的@@ODR精度@@。
KX134和@@KX132三轴数字加速度计@@还具有出色的耐热性能和@@耐冲击能力@@,并内置稳压器@@,可应对严苛的工作环境@@。
灵敏度可选的法兰安装式磁簧传感器@@
磁力式碰撞传感器@@也是@@一种应用广泛的碰撞检测@@传感器@@,它通过磁性材料的磁性特性来检测磁场的变化@@,并将其转换成电信号输出@@,实现对物理量的测量@@。作为磁力式碰撞传感器@@的一种@@,应用于协作机器人@@上时@@,磁簧传感器更多是@@用于限位和@@安全访问@@。
接下来我们为大家推荐一款超小型法兰安装式磁簧传感器@@@@,来自制造商@@Littelfuse,贸泽电子@@@@官网@@上该器件的料号为@@59155-1-S-02-A。
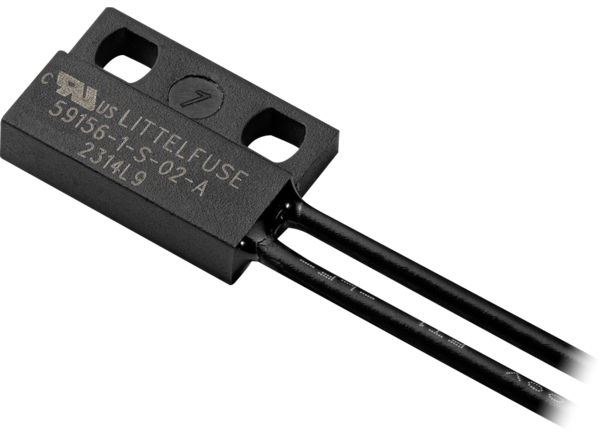
图@@6:Littelfuse超小型法兰安装式磁簧传感器@@(图@@源@@:贸泽电子@@@@)
59155和@@59156是@@Littelfuse新推出的超小型法兰安装式磁簧传感器@@@@,与目前市场上类似尺寸的产品相比@@,59155和@@59156更加小巧@@,尺寸仅为@@12.70mm x 9.00mm x 3.00mm,仅占用@@1.09cm2电路板空间@@@@。
尺寸虽小@@,不过@@Littelfuse超小型法兰安装式磁簧传感器@@的性能很出色@@。59155和@@59156具有非常高的切换能力@@,可以在@@10W的条件下切换@@120VAC/170VDC。这些法兰安装式磁簧传感器采用非接触式开关@@,适合用于潮湿和@@恶劣环境@@。他们的法兰支座的外壳设计支持可定制@@,具有绝佳的可调节性@@,使其适合不同行业的各种小间距应用@@,这当然@@也包括从事严苛复杂工作的协作机器人@@@@。
Littelfuse超小型法兰安装式磁簧传感器@@采用壳体设计@@,可使用@@M2螺丝以@@0.1Nm扭矩进行安装@@,也支持黏合式安装@@,因此非常易于使用@@。除了应用于协作机器人@@的接近@@/限位传感@@、安全和@@访问控制@@,这些法兰安装式磁簧传感器也可用于工厂自动化@@、加工设备@@@@、家电和@@物联网@@等领域@@。
协作机器人@@的柔性交互@@
对于协作机器人@@@@,很多人都熟知它是@@工作制造领域柔性生产的重要组成部分@@。面向未来@@,协作机器人@@在包括碰撞检测@@等方面的发展也需要更加柔性@@。上述我们详述了协作机器人@@的碰撞检测@@@@@@,现阶段产业也取得了长足进步@@。不过@@,从用户的角度来看@@,这明显还不够@@。
在部署时@@,协作机器人@@对于环境的了解还是@@半自适应的@@,需要人类操作其在工作空间@@内巡航至少一次才能够对路线有大致理解@@。在和@@人类交互时@@,目前协作机器人@@为了避免碰撞@@,基本采取直接停止工作的方式应对@@,和@@我们理想中的人机协作还有差距@@。为了进一步提升柔性交互的体验@@,感知能力@@、学习能力等方面还需要精进@@,需要更好的传感器和@@算法支持@@。
未来的协作机器人@@必将会更加智能@@、灵活@@、多功能和@@人性化@@,贸泽电子@@@@也将持续将先进的器件带给大家@@,与行业和@@从业者共同成长@@。
本文转载自@@:贸泽电子@@@@