1996年@@,美国西北大学的@@两位教授@@J.Edward Colgate和@@Michael Peshkin率先提出了@@“协作机器人@@”的@@概念@@。他们希望探索一种能够在确保工人安全的@@前提下@@,还能与之和@@谐共事的@@机器人@@。虽然他们的@@构想因当时的@@技术@@局限性未能实现@@,但这种人机协作@@的@@理念将人机交互推向了机器人技术@@发展的@@前沿@@。
经过多年@@的@@@@技术@@革新@@,终于在@@2004年@@,KUKA发布了全球首个协作机器人@@@@——LBR,随后@@2008年@@,优傲机器人@@(Universal Robots)的@@UR5首次实现了协作机器人@@的@@商业成功@@。自此@@,协作机器人@@也在全球范围内的@@崭露头角@@。
而今@@,协作机器人@@已经成为了制造业中不可或@@缺的@@关键帮手@@,它不仅大幅提高@@了生产效率和@@灵活性@@,还彻底重塑了工业@@生产的@@面貌@@。而且随着成本和@@技术@@的@@持续优化@@,开始走向更为丰富的@@商业场景@@。







图@@1:协作机器人@@历史@@(图@@源@@:AUGMENTUS)
从@@robot到@@cobot人机交互的@@的@@跨越@@ 协作式机器人@@(collaborative robot)简称@@cobot,是可以和@@人类在同一工作空间@@中协同作战@@,并实现近距离互动的@@机器人@@。从@@机器人@@(robot)到@@协作机器人@@@@(cobot),人机交互实现了巨大的@@跨越式发展@@。 传统机器人是按照预先编程进行自动作业@@,或@@者是在有限的@@导引下进行作业@@,缺乏主动避让人类的@@安全功能@@。若需与人共享同一工作空间@@@@,传统机器人就必须配备@@安全防护装置@@,通过人机隔离以保证工人的@@安全@@,这自然也就隔断了人机之间的@@互动可能@@。 相较之下@@,协作式机器在互动性和@@安全性方面表现出色@@,能与人类更密切的@@合作@@。机器人发挥其效率和@@准确性优势@@,而人类则发挥智慧和@@创造专长@@。两者人机协同@@,可让生产制造环节在创新和@@生产力之间取得更好的@@平衡@@。图@@2:人机协作@@(图@@源@@:Mechanical Engineering)
工业@@4.0时代@@,制造业需要更快速@@、主动地响应不断变化的@@消费者需求@@。对于某些定制产品@@而言@@,其制造流程和@@工艺可能都是根据@@客户的@@个性化需求量身定制的@@@@。这种大规模定制化的@@制造趋势@@,给工厂的@@装配工作提出了更高的@@要求@@。 据@@相关数据@@@@显示@@,在新时代@@工业@@制造中@@,装配工作约占总工作量@@45%,占总生产成本的@@@@20%-30%。而协作机器人@@的@@出现@@,可以大幅提升装配线效率@@、精度等@@@@,更适合定制化的@@产线作业@@,是当前及未来工业@@制造中不可替代的@@@@“生产工具@@”。 Brimind是一家汽车类传感器制造商@@,其传感器产品@@尺寸非常小@@,重量也很轻@@,非常考验机器人的@@识别精准度和@@夹持力度@@。为了提高@@装配效率@@,减少人为失误造成的@@损失@@,Brimind在装配线的@@三个站点引入了@@ABB的@@GoFa协作机器人@@。实际结果表明@@:开始时人工纯手动方法实现了接近@@90%的@@OEE(Overall Equipment Effectiveness,设备@@综合效率@@),而引入协作机器人@@后@@,装配站目前的@@@@OEE达到@@了@@97%。 另一个案例来自宝马汽车@@:汽车差速器的@@装配对于精度要求极高@@,需要将各个部件实现分毫不差的@@组装@@。然而差速器的@@壳体重达约@@5.5kg,因此对于装配人员而言操作困难@@、耗时较长@@,且装配精度难以保证@@。在引入了@@KUKA公司的@@@@LBR iiwa轻型协作机器人@@后@@,就可以人机协作@@实现锥齿轮的@@灵敏接合@@,现在差速器和@@壳体的@@接合整个过程耗时不到@@半分钟@@。图@@3:BMW使用协作机器人@@进行变速器组装@@(图@@源@@:KUKA)
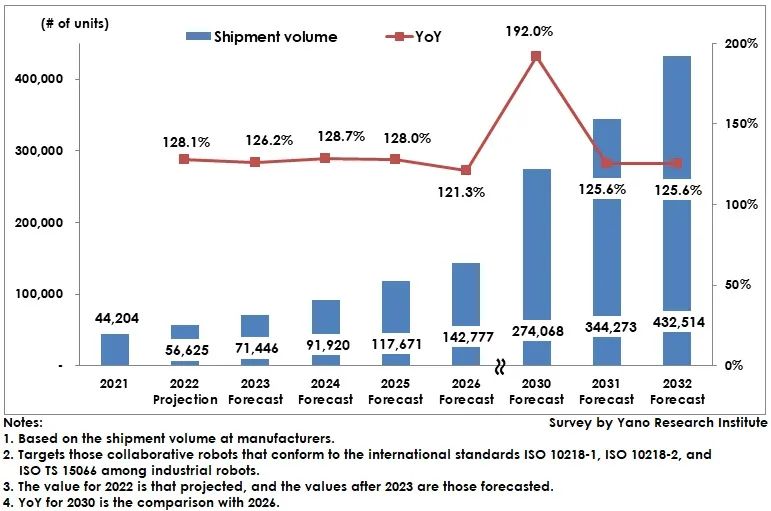
据@@Yano Resarch的@@预测@@,2032年@@全球协作机器人@@的@@出货量将从@@@@2021年@@的@@@@44,204台@@增加至约@@432,514台@@;市场规模从@@@@9.94亿美元@@增长至@@70亿美元@@。 中国是制造业大国@@,对于协作机器人@@的@@市场需求也是逐年@@增加@@。据@@高工机器人产业研究所@@(GGII)数据@@@@,2022年@@我国协作机器人@@销量约为@@3.5万台@@@@,整体市场规模达到@@了@@@@36.05亿元@@。如此大的@@市场和@@未来增长前景@@,吸引了全球协作机器人@@企业的@@争先涌入@@。图@@4:全球协作机器人@@出货量变化与预测@@(图@@源@@:Yano Research)
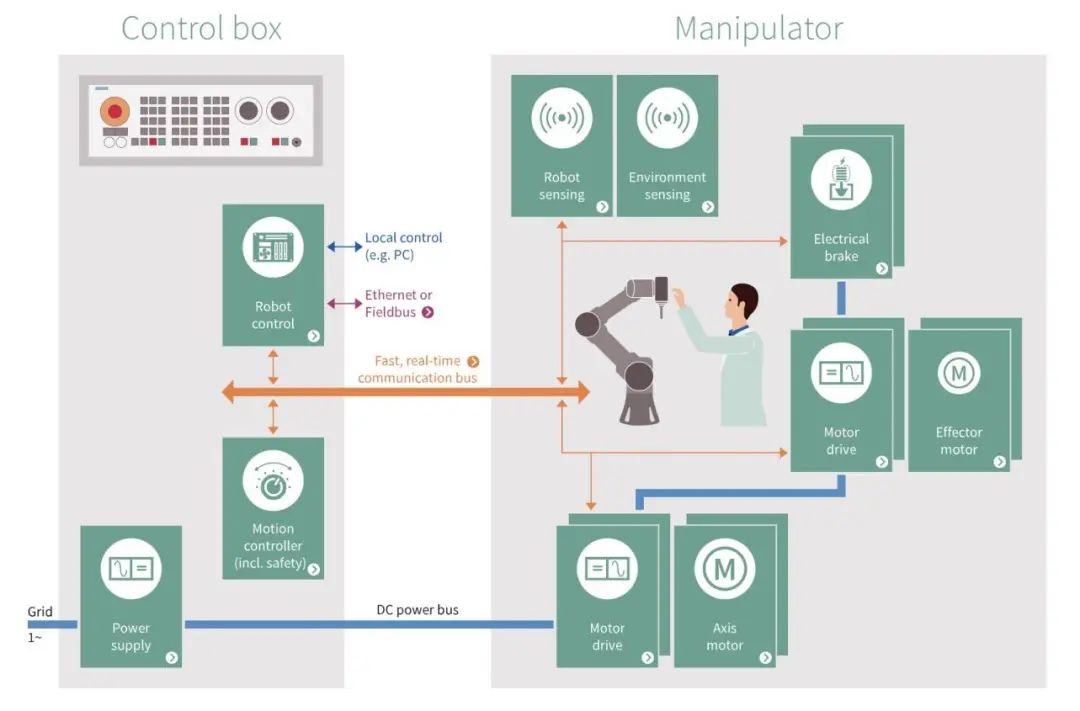
更好的@@前景也吸引了资本的@@纷纷入局@@,2022年@@中国协作机器人@@市场共发生@@13起@@,总规模超过@@50亿元@@人民币@@的@@融资案例@@。其中节卡机器人于@@2022年@@7月宣布完成约@@10亿元@@人民币@@D轮融资@@,创下了协作机器人@@领域融资金额新高@@。 交互能力的@@实现@@:感知@@、计算和@@@@HMI缺一不可@@ 协作机器人@@要与人类在实时动态环境中无缝合作@@,需要具备@@强大的@@交互能力@@。通过这种交互能力@@,协作机器人@@得以准确快速地理解人类意图@@@@、有效沟通并适应动态环境@@。 而这种交互能力的@@实现@@@@,需要感知@@@@、计算和@@@@人机界面@@(HMI)等@@多个功能模块的@@协同工作@@。图@@5:协作机器人@@框图@@@@(图@@源@@:英飞凌@@)
感知@@能力是协作机器人@@顺利执行任务的@@基石@@。具体而言@@,感知@@部分分为环境感知@@和@@机器人自身感知@@两大类@@。环境感知@@主要依靠传感器来收集周围环境的@@信息@@,从@@而判断是否满足工作的@@条件@@。而机器人自身感知@@则通过一系列@@传感器@@,如位置传感器@@、力矩传感器@@、视觉传感器@@、压力传感器以及@@3轴陀螺仪或@@@@IMU等@@,来确保机器人的@@动作精准无误@@,同时实时监测人体位置@@,有效避免任何潜在的@@相互干扰@@。 在计算部分@@,协作机器人@@的@@每个运动轴通常都配备@@了独立的@@微控制单元@@(MCU)来负责电机的@@精准控制@@。而对于机械臂整体智能的@@协调@@,比如传感信号的@@采集@@、视觉信息的@@处理@@、工业@@互联及人机界面@@(HMI)等@@复杂任务@@,则需依赖功能更强大的@@微处理器@@(MPU)、系统芯片@@(SoC)或@@中央处理器@@(CPU)来实现@@。这些核心的@@计算与控制功能@@,有时直接集成于协作机器人@@中@@,但更多情况下是通过外部的@@独立控制器来完成@@。 至于人机界面@@(HMI),常见的@@形式包括触控屏@@、交互式按钮@@、语音识别系统等@@@@。这些界面同样依赖传感器与@@MCU的@@配合@@,以实现直观且高效的@@人机交互@@。图@@6:协作机器人@@应用框图@@@@(图@@源@@:英飞凌@@)
那什么样的@@器件才能够满足协作机器人@@的@@感知@@@@、计算和@@@@HMI应用需求@@?接下来我们一同探究@@。 为电容@@/电感传感而生的@@@@MCU 电容传感技术@@适用于那些需要触摸按钮@@、滑条@@、旋钮@@、触控板以及触摸屏等@@交互界面的@@应用场景@@。相较之下@@,电感传感技术@@则是一种既可靠又经济的@@方案@@,它不仅能与现有的@@用户界面无缝集成@@,还能用于检测金属或@@其他导电物体的@@存在@@。 英飞凌@@(Infineon Technologies)提供了先进的@@@@CapSense电容传感和@@@@MagSense电感传感产品@@@@,而且还提供了更易与这两类传感器结合的@@@@PSoC4系列@@MCU产品@@。图@@7:PSoC4电感应用框图@@@@(图@@源@@:英飞凌@@)
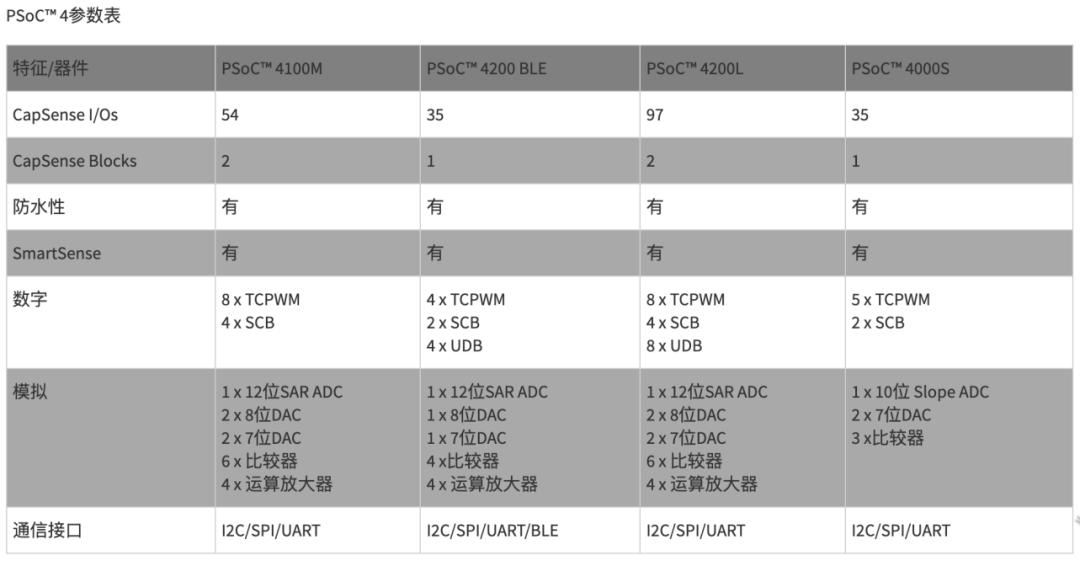
PSoC4系列@@微控制器基于@@Arm Cortex-M0架构@@,这不仅保证了较低的@@能耗@@,而且其主要特色在于其内置的@@混合信号架构@@@@。该架构@@配备@@了丰富的@@模拟和@@数字资源@@,特别是为@@CapSense和@@MagSense量身打造的@@专用模块@@,大大简化了与电容和@@电感传感器的@@接口设计@@,提高@@了信号处理的@@效率@@。 关于@@PSoC4系列@@我们推荐的@@具体型号为@@CY8C4024LQS-S411,详情可在贸泽电子@@@@官网@@上查询@@。图@@8:PSoC4参数表@@(图@@源@@:英飞凌@@)
赋予机器人聆听的@@能力@@ 在人机交互领域@@,语音互动无疑是实现自然沟通的@@关键手段之一@@。机器人能够通过内置麦克风@@捕捉人类的@@语音指令@@,并通过扬声器进行即时反馈@@,从@@而实现双向的@@语音交流@@。 对于构建高效的@@语音用户界面@@(VUI),英飞凌@@的@@@@XENSIV™ MEMS麦克风@@系列@@是不错的@@选择@@。这一系列@@的@@麦克风@@拥有高达@@105dB的@@动态范围@@,即便在嘈杂的@@环境或@@高声压级下@@,也能以极低的@@自噪声和@@微小的@@失真保持音质纯净@@,确保对音频信号的@@精准捕捉@@。 推荐产品@@型号为@@IM67D130AXTSA2,详细信息可在贸泽电子@@@@官网@@上查询@@。图@@9:XENSIV™ MEMS麦克风@@(图@@源@@:贸泽电子@@@@)
探索未来@@:自然人机交互的@@新纪元@@ 协作机器人@@的@@人机交互正逐渐迈向其终极目标@@:打造一种如同人与人交流般自然流畅的@@互动模式@@。在这种理想的@@互动中@@,哪怕是微妙的@@眼神和@@肢体语言都能成为信息传递的@@载体@@。技术@@的@@不断进步@@,尤其是在自然交互与情感表达方面的@@突破@@,为我们揭示了这一愿景的@@实现之路@@。 随着大语言模型@@(LLM)技术@@的@@兴起@@@@,将其与协作机器人@@进行结合正变得越发可行@@。展望未来@@,人类将能够借助自然语言与协作机器人@@进行沟通@@,而非局限于预设的@@固定语音指令@@。得益于语义分析能力的@@加持@@,协作机器人@@在自然学习方面的@@潜力将得到@@极大拓展@@;相比之下@@,传统的@@轨迹学习能力不过是冰山一角@@。曾经高大上的@@手势识别与追踪等@@功能@@,也将成为协作机器人@@的@@标准配置@@。 此外@@,如何强化人们对机器人的@@信任感也是人机交互研究的@@重要议题@@。机器人意图@@的@@可视化表达是增强信任的@@有效手段之一@@,这可以通过变换@@LED灯光颜色或@@利用显示屏演绎面部表情等@@多种方式实现@@。 而要实现更深层次的@@无缝协作@@,我们可以考虑将虚拟现实@@(VR)技术@@与协作机器人@@相结合@@,甚至通过脑机接口等@@尖端技术@@实现人与机器共融@@,从@@而达到@@真正的@@无缝协作@@。图@@10:有表情的@@@@Sawyer协作机器人@@(图@@源@@:Rethink Robotics)
随着技术@@的@@不断进步@@与创新@@,我们正向着实现更加自然@@、无缝的@@人机协作@@关系的@@愿景稳步前行@@。协作机器人@@的@@交互不仅仅是技术@@进步的@@体现@@,更是人类生产方式@@、工作环境乃至生活方式的@@一次深刻变革@@。这一切的@@努力@@,都旨在打造一个人与机器人能够和@@谐共处@@、互助互补的@@未来世界@@。 本文转载自@@:贸泽电子@@@@