随着科技的@@日新月异@@,人类与机器人的@@互动将愈发频繁@@。从早晨在本地咖啡店里@@,协作机器人@@ (cobot) 为顾客精心冲泡咖啡@@,到在仓库中@@@@,自主移动机器人@@ (AMR) 自由穿梭各处拣选包裹@@。协作机器人@@可以在我们日常生活中@@的@@很多方面发挥作用@@。
安森美@@ (onsemi) 开发了一款自主移动机器人@@演示@@,该@@演示由多个子系统方案@@构成@@,是@@一个使用@@安森美@@创新产品打造的@@完整的@@机器人设计@@。这个概念设计结合了安森美@@的@@各种不同感知和@@智能@@电源@@方案@@@@,可用于设计各种类型的@@机器人@@、协作机器人@@、电动工具和@@自动引导车@@。本文将从以下五个问题@@@@,帮助您更深入地了解自主移动机器人@@的@@未来发展方向@@。
1. 安森美@@所研发的@@自主移动机器人@@@@,由安森美@@的@@多种子系统方案@@构成@@。请简要介绍一下这些子系统@@。
我们基于我们的@@产品制作了评估板@@ (EVB) 和@@开发平台@@。这些平台用于各种@@AMR子系统中@@@@,包括@@运动@@@@、传感器@@、电源@@、照明@@和@@通信@@@@。这些子系统与控制单元相结合@@,构成了一个自主移动的@@基础@@,它可以在其环境中@@导航并在需要时使用@@防碰撞功能@@安全地重新规划路径@@,以绕过障碍物@@。为了能够升级和@@使用@@我们最新的@@@@EVB并纳入一些客户产品@@(例如@@摄像头@@),该@@AMR使用@@DIN导轨来安装@@EVB,并使用@@球头安装座@@1/4-20来安装传感器@@@@。每个子系统都包含了以下一些重要的@@安森美@@产品@@:
照明@@
照明@@子系统用于向周围的@@人传达@@AMR的@@状态@@、状况和@@意图@@@@。在智能@@零售库存应用中@@@@,照明@@还可以用于在昏暗的@@商店中@@照亮产品@@。照明@@子系统中@@@@使用@@了@@NCV7685线性电流驱动器@@和@@@@NCL31000智能@@LED驱动器@@,其中@@后者具备@@可见光通信@@和@@室内定位@@EVB功能@@。
运动@@
运动@@子系统中@@@@使用@@了安森美@@三相栅极驱动器@@@@NCD83591、电源@@稳压器@@ NCP730和@@用于@@BLDC电机驱动的@@最新@@Trench 10 MOSFET NVMFWS0DxN04XM方案@@。
传感器@@
传感器@@子系统中@@@@使用@@了图@@像传感器@@@@AR0234和@@AR1335以及@@NCS32100角度电感式位置传感器@@和@@超声波传感器@@@@NCV75215。
电源@@
电源@@子系统中@@@@使用@@了@@FAN65008B,该@@器件是@@一款集成功率@@MOSFET的@@PWM降压稳压器@@,可通过@@48V电池生成@@AMR所需的@@功率水平@@。FAN65008B包含一系列保护电路@@,包括@@OCP、TSD、OVP、UVP和@@SCP。电源@@子系统还包括@@电池监控@@、基于无桥图@@腾柱@@ NCP1681的@@超紧凑充电方案@@和@@电子@@保险丝@@NIS3071以及@@电流监控@@。
通信@@
通信@@子系统中@@@@使用@@了@@NCN26010,该@@器件是@@一款符合@@IEEE 802.3cg标准的@@多分支以太网@@@@10Base-T1S收发器@@,其中@@包括@@@@MAC、PLCA和@@协调子层@@ (RS)。10Base-T1S是@@AMR连接所有子系统的@@骨干@@。最后@@,控制单元使用@@了@@NVIDIA® Jetson™。这提供了一个很好的@@集成示例@@,说明了如何在机器人操作系统@@@@ (ROS) 中@@以@@Docker容器形式实现各种安森美@@子系统@@。
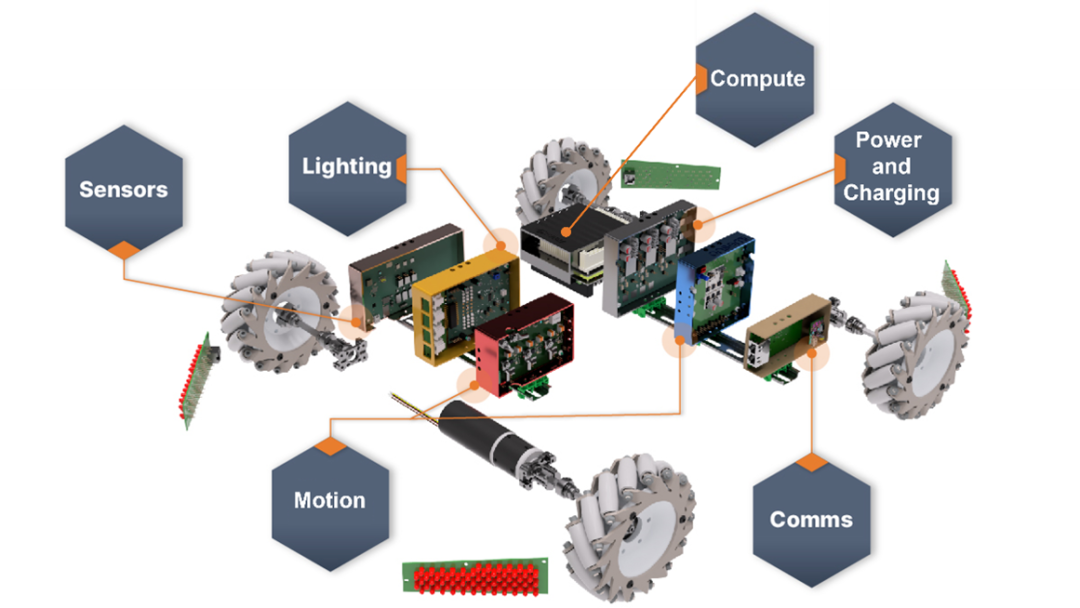
图@@1:用于自主移动机器人@@的@@安森美@@子系统@@
2. 该@@自主移动机器人@@中@@添加了哪些安森美@@产品@@,它们的@@功能@@是@@什么@@?
如前所述@@,我们使用@@了@@DIN导轨来构建安森美@@@@AMR,以便能够添加新的@@产品与功能@@@@。此外@@,安全性始终是@@我们关注的@@重点@@,我们将通过使用@@安森美@@的@@新型电子@@保险丝产品@@e-Fuse NIS3071来扩展电源@@子系统@@。
3. 设计人员在打造机器人时面临哪些挑战@@?安森美@@的@@子系统方案@@如何通过更简单的@@集成来应对这些挑战@@?
这是@@其中@@一个最重要的@@问题@@。例如@@,我们会与一些公司合作@@,将安森美@@图@@像传感器@@和@@@@ LiDAR 技术@@集成到他们的@@摄像头系统中@@@@,从而将图@@像感知和@@深度感知融合到一个系统中@@@@。我们会思考如何更好地为他们提供支持@@,了解并识别还没有集成到我们产品之中@@@@、未来可能导入我们产品的@@算法或@@功能@@@@。
对机器人设计人员来说也是@@如此@@。通过构建安森美@@@@AMR,我们得以深入探索@@ ROS(机器人操作系统@@)环境在@@Nvidia Jetson上的@@运行方式及其对驱动程序的@@需求@@。此外@@,我们还得以研究@@Nvidia Omniverse™和@@Isaac Sim™(机器人仿真与合成数据平台@@)。仿真环境在@@打造安全的@@@@AMR设计中@@发挥了关键作用@@。仿真环境用于训练移动机器人处理合成数据@@,安全导航以绕过障碍物@@@@。这些仿真环境用于寻找最节能的@@路径@@,延长电池充电周期@@,或@@者利用机会进行充电@@,从而突显安森美@@的@@高能效电源@@和@@智能@@感知用于@@AMR子系统中@@@@的@@优势@@。
4. 机器人市场正在迅速发展@@,在未来五年内机器人技术@@会有哪些发展@@?会取得哪些进步@@?
那时@@,AMR已经不需要训练轮@@,甚至更好的@@是@@@@,由于它们安全且高效@@,因此对@@AMR来说已经不存在物理障碍了@@,AMR可以在人群中@@自由移动@@。环境仍然是@@受控的@@@@,比如照明@@受控且地面平整的@@仓库和@@@@/或@@办公室环境@@。AMR将能够适应任何环境@@,就像人一样@@。此外@@,真正的@@部署灵活性是@@一个关键特性@@。这需要一个接口来指导或@@训练机器人做事情@@,而不需要编程@@。NLP(自然语言处理@@)、智能@@高效的@@硬件传感器@@以及@@电源@@和@@控制方面的@@进步将被整合到@@AMR中@@,以执行一般任务@@。机器人可以一会儿操作数控机床@@,一会儿包装产品@@。或@@在农业环境中@@@@,AMR可以一会儿除草@@,一会儿采摘成熟的@@蔬菜@@,然后将其包装好以便装运@@。
5. 在设计过程中@@@@,有没有发生什么有趣的@@故事@@?
在打造安森美@@@@AMR的@@过程中@@发生了很多事情@@,其中@@有一次@@,我们偶然把万向轮装错了@@,结果导致移动机器人在实际应用中@@的@@驾驶行为非常滑稽@@,而在仿真环境中@@@@,车轮的@@安装位置是@@正确的@@@@,行为也很正常@@。还有一次@@,我们将电机绕组连接线暴露在外@@,并与铝材接触@@,导致产生了反电动势@@(受影响的@@车轮无法转动@@),一名工程师拆下了车轮轴承@@,但仍不明白车轮为何无法转动@@。这个问题@@后来成为了新工程师加入团队时学习@@EMF的@@一个有趣案例@@。在安森美@@@@,许多不同的@@工程师都参与了子系统的@@设计工作@@。大家都很高兴能将这些系统集成到一个自主移动机器人@@中@@@@。

图@@2:安森美@@自主移动机器人@@@@
随着机器人技术@@在我们的@@日常生活中@@变得更加高效和@@可靠@@,安森美@@将继续开发可以集成到@@AMR的@@技术@@@@。运动@@、传感器@@、电源@@、照明@@和@@通信@@@@子系统是@@自主移动机器人@@的@@构建模块@@。